FA201 - Kraftfahrzeugdynamik (WS22/23)
Kursthemen
-
-

-
Impressionen der Arbeit des IFM – Institute for Advanced Driver Assistance Systems and Connected Mobility.
-
ACHTUNG: Vorlesung ist in Präsenz geplant. Zoom Link ist als Back-up und ggf. zur Aufzeichnung der Präsenzveranstaltung gedacht.
Bernhard Schick lädt Sie zu einem geplanten Zoom-Meeting ein.
Thema: FA201 - Kraftfahrzeugdynamik - Zoom meeting invitatio
Zoom-Meeting beitreten
https://hs-kempten.zoom.us/j/99584547480?pwd=WGZUeC9wUmNkeElLMFpJNit1MFRyQT09
Meeting-ID: 995 8454 7480
Kenncode: 480427
Schnelleinwahl mobil
+496938079883,,99584547480#,,,,*480427# Deutschland
+496938079884,,99584547480#,,,,*480427# Deutschland
Meeting-ID: 995 8454 7480
Kenncode: 480427
Ortseinwahl suchen: https://hs-kempten.zoom.us/u/adeqkDFvdo -
Power Point Vorlage zur Zusammenfassung und Präsentation der Ergebnisse aus Projekt- und Gruppenarbeiten. HIer finden Sie einige Masterfolien, die Ihnen die Erstellung und Gestaltung der Präsentation einfacher macht.
-
Anbei das neue VPN Zertifikat und KW für den CarMaker und MXeval Lizenzzugriff im IFM. Bitte das Zertifikat ins ensprechende Laufwerk koopieren und dann mit KW verbinden.
AdasMaster_WS2020@institut-ifm.de
o-bf3U49ByZP
BItte tragen Sie in Ihren Lizenzfile unter .\IPG\etc License folgende Servername ein: Server 10.6.0.7
Den alten Server können Sie mit # auskommentieren.
-
-
Virtual Test Driving (VTD) CarMaker Quick Start Guide im Selbststudium!
-
Geöffnet: Sonntag, 12. September 2021, 00:00Fällig: Mittwoch, 29. September 2021, 00:00
Der CarMaker QuickStartGuide bietet Ihnen die Möglichkeit sich in den virtuellen Fahrversuch einzuarbeiten. Sie lernen dabei an konkreten Beispiele n "Hands-On" die wichtigsten Funktionen von CarMaker kennen und sind anschließend in der Lage Versuche aufzubauen, durchzuführen und zu analysieren. Im weiteren Verlauf der Vorlesung werden Sie CarMaker für verschiedenen standardisierte Fahrmanöver, wie stationäre Kreisfahrt (ISO 4141) oder Lenkwinkelsprung (ISO 7401 u.v.m.) anwenden und die Fahreigenschaften von Fahrzeugen bewerten lernen. Dafür ist der Umgang mit dem Simulationswerkzeug elementar. Es ist daher unbedingt zu empfehlen sich im Eigenstudium diese Kenntnisse anzueignen. Sie werden den Umgang mit CarMaker auch in anderen Modulen brauchen.
Bitte melden Sie zurück wie gut Sie klar gekommen sind. Für diejenigen, die den CarMaker schon gut kennen bitte kurze Angabe woher.Den QuickStartGuide finden Sie auch in der Software. In der Anlage erhalten Sie die aktuelle Version.
-
https://syncandshare.lrz.de/getlink/fi9bCLSrzUo8BHHwu2eQcjVU/CM_9.0_Golf_GTD_Training.zip
Folgende Vorgehensweise:
- Bitte auf Ihrem Laufwerk eine Ordner CM_Projects anlegen.
- Dort die die Datei entzippen
- In CarMaker Projekt öffnen
- Bitte auf Ihrem Laufwerk eine Ordner CM_Projects anlegen.
-
https://syncandshare.lrz.de/getlink/fiEwRtGs8vE6qQ4QqYFdGJcm/ADAS_Master_ESP_CM9.zip
Bitte in Ihrem CarMaker Projektordner entzippen.
-
Anbei das Installationpaket für OpenVPN (VPN + Konfiguration).
User: ext_vorlesung_wise@insitut-ifm.de
KW: zPav92nEiuNz
-
- BItte kopieren Sie den Lizenzfile (Licenses) in C:\IPG\etc
- Der Lizenzfile darf keine Extension haben, sonst wird der nicht erkannt. Bitte den Explorer so einstellen, dass Sie die Extensionen sehen
- Falls Sie schon einen Lizenzfile haben, sichern Sie diesen in einem Unterordner. Falls Sie auf die Lizenz auf dem Hochschulnetz zugreifen müssen Sie dafür einen eigenen Lizenzfile mit der notwendigen IP erzeugen.
- Im Lizenzfile steht lediglich
# IFM Server
Server 10.7.0.7 - # bedeutet Kommentar. Sie können auch mehrer Lizenzserver angeben und jeweils auskommentieren.
- Damit die Verbindung zum Netzwerklizenzserver gelingt muss der entsprechende VPN hergestellt sein.
-
Bitte laden Sie MXeval Release 4.x herunter und installieren Sie das Softwarepaket.
Online documentation: https://cloud.mdynamix.de/dl/products/mxeval/doc/gui/userguide.html
YouTube tutorials:https://www.youtube.com/playlist?list=PL5Dou7ccfQDdnOnoTgq9xq75iFwc9NNhk
Homepage: https://mdynamix.de/mx-products/mxeval/
Klicken Sie auf 'https://cloud.mdynamix.de/dl/products/download_center/html/mxeval.html', um die Ressource zu öffnen.Die Lizenzeinbindung machen wir gemeinsam: 27003@ifmsrvlicenses.institut-ifm.de
-
-
Requirements for vehicles and their global attributes
-
Vehicle dynamics attributes and their target conflicts
-
Test and evaluation methods for vehicle attributes (1)
-
Test and evaluation methods for vehicle attributes (2)
-
Bitte schauen Sie sich die Vorlesung 4 an und führen die entsprechenden CarMaker Simulationsübungen durch.Passcode: XFC9=U^9
-
Bitte führen Sie die folgende CarMaker Manöverbeispiele (Product Expamples) für die Querdnamik aus:
Closed Loop
- Lane Change
- Slalom 18 m
Open Loop- Steady State Circular100m
- StepSteer
- SineSteering
Bringen Sie dazu die wichtigsten Signale von Seite 134 vom Skritp zur Datenanalyse (IPGControl):- Input: Steer.WhlAng
- Response (LatDynamik): Car.Roll, Car.YawRate, Car.ay, Car.v, Car.SideSlipAngle
- Wirkkette:
Reifenseitenkräfte: Car.FyFL, Car.FyFR, Car.FyRL, Car.FyRR
Aufstandskräfte: Car.FzFL, Car.FzFR, Car.FzRL, Car.FzRR
- Welchen Lenkwinkelbedarf und welche Querbeschleunigungsnieveau wird in den beiden Closed Loop Manöver erreicht?
- Welche Beobachtungen machen Sie auf der Radlast der verschiedenen Räder?
- Welche Beobachtungen machen Sie im Lenkwinkel-, Schwimmwinkel- und Wankwinkelverlauf bei der stationären Kreisfahrt?
- Welche initale Werte bei ay ~ 0 m/s2 stellen sich ein?
- Welche Beobachtungen machen Sie auf der Radlast kurvenaußen und kurveninnen?
- Beladen
(Main GUI Load) Sie das Fahrzeug mit 200 kg a) auf dem Schwerpunkt, b)
auf der Vorderachse und c) auf der HInterachse jeweils auf
Schwerpunktshöhe.
Wie verändert sich der Lenkwinkelverlauf? Was schließen Sie daraus? - Welche Beobachtungen machen Sie im Signalverlauf im StepSteer?
- Welche Änderung beobachten Sie in der Gierratenamplitude über die Frequenz im SineSteering?
-
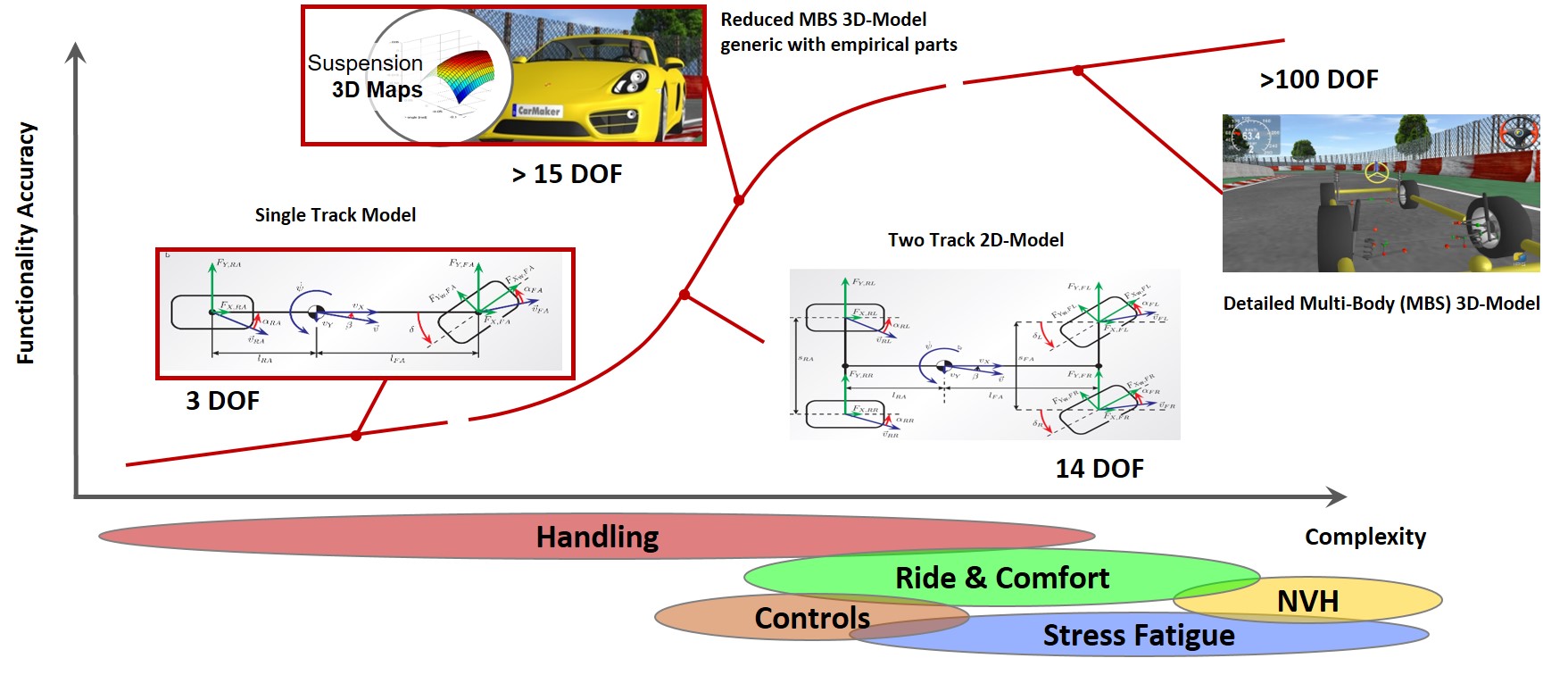
Basic vehicle dynamics calculation and vehicle models with exercise
-
Einspurmodell integriert in CarMaker. HIer wurde das Fahrzeugmodell in Simulink ausgewechselt --> 3DOF
-
Fahrevent Fahrerassistenzsysteme im Kontext Fahrdynamikfindet wie angekündigt am 11.11.2021 statt. Wir haben ein umfangreiches Programm mit mehreren Stationen und aktuelleste Premium-Fahrzeuge für Sie vorbereitet. Dabei sind viele wissenschaftliche Mitarbeiter im Einsatz, um Ihnen aktuelles Wissen aus den Forschungsprojekte zu berichten. Das Ziel ist es, dass Sie die Fahreigenschaften und aktuelle Funktionen erleben und Bewertungsmethoden kennenlernen.4 Stationen (1h je Station im Wechsel):
- Fahreigenschaften auf der Handling- & Komfortrunde (Ride&Handling)
- Längs- und Querführende FAS (Autobahn und Landstraße)
- automatisiertes Parken (Parkplatz IFM)
- Führung IFM mit Besuch dynamischer Fahrsimulator
-
Practical Exercises
- CarMaker Exercises after Lecture 3 (Questions)
- Steady State Circular Driving
-
Geöffnet: Sonntag, 17. Oktober 2021, 01:00Fällig: Mittwoch, 27. Oktober 2021, 01:00Please conduct a steady state circular driving test according the ISO 4138 with a related test conditions.1. Analyse the ISO 4138 test condictionse.g.
- Constant Radius: 100 m
- Speed: 0 – max kph
- day: 0,1 m/s²/s
- SWA, ay , Yaw, Radius: steady state condition
2. Aply the test in CarMaker according the ISO 4138 (lecture script reference slice 161-176).
Please note, that the CarMaker sample is not within the ISO specification!3. Conduct the test and visualize the relevant quantities.4. Analyse following KPI - Key Performance Indicator:Ackermann Angle(SWA)
Understeer Gradient
ay,max
Yaw Gain Max (RealttimeExpression Calculation within MiniManeuverCommand --> Qu::YawGain=Car.YawRate/Steer.WhlAng
Roll Stiffness
SWT max
Ay rel at SWT
- Side Slip Max
5. Optimize KPI's:- Improvement of ay max as much as possible
- Decrease of roll stiffness of >15%
- Reduction of understeer gradient to < 2,5 °/g
- Reduce Ackermann >10 %
7. Create a short report of the results. -
Geöffnet: Sonntag, 17. Oktober 2021, 01:00Fällig: Mittwoch, 27. Oktober 2021, 01:00
1. Conduct a slowly increase steer test up to the physical limit with following test conditions:
- V = 100 kph
- Steering Angle Speed max: 13,5°/s
2. Analyse following KPI's- Steer Wheel Angele-SWA at 3 m/s²
- SWA at 4 m/s²
- ay max
- Roll Angle max
- Yaw Rate max
- SWT - Steer Wheel Torque
- ay at SWT max
- Yaw Gain max
3. Create a result report
-
Chassis components and functions – Tire & Wheels
-
Chassis components and functions – axle & suspension
-
Das Skript wurde am 26.11.2020 um 16:20 Uhr aktualisiert. Eine Folie zum Nachlauf wurde ergänzt.
-
Thema: Vorlesung Kraftfahrzeugdynamik ADAS Master
Datum: 26.Nov.2020Kenncodezugriff: vtW!4yK^
-
Chassis controls and functions (1) - Overview & Brakes & Steering
-
Chassis controls and functions (1)
- brake
- steering
- interaction chassis control with ADAS
- suspension control
- differential control
-
Anbei finden Sie einen HTLM-Report eines Reifenvergleichs, damit Sie sehen welche KPI's erhoben werden, welche Plots gemacht werden und wie stark sichtbart unterschiedliche Reifen eines Fahrzeuges in Eigenschaften wirken:
- Fahrzeug: Golf 7 GTD
- Reifen [1]: Performance Reifen
- Reifen [2]: Presse-Reifen
- Reifen [3]: Basis-Reifen
Tests:
- Weave - ISO 13674-2 (On-Center Handling)
- Step Steer - ISO 7401 (Lateral Response Test)
- Steady State Circular - ISO 4138 (Steady Circular Driving)
- Quasi-Static Test (Slowly Increase Steering Test - ISO 19364 -Steady Circular Driving Simulation Validation)
Einfach entpacken und report.html im Browser öffnen. -
Geöffnet: Donnerstag, 18. November 2021, 00:00Fällig: Mittwoch, 22. Dezember 2021, 00:00
Bitte bearbeiten Sie folgende Aufgabe:
- Analysieren Sie die ISO 7401 - nur Step Input
- Setzen Sie den Versuch, inkl. Vorversuch zur Identfikation des Lenkwinkel entsprechend des Standards in CarMaker um
Hinweis: Der Versuch in CarMaker entspricht evt. nicht der ISO! - Führen Sie den Versuch durch
(a) Basisvariante
(b) Stabilisatoramplifikation (Faktor 4 / Faktor 0,25)
(c) Dämpfervarianten (Faktor 4 / Faktor 0,25 in Zug und Druckstufe)
(d) Schwerpunktslage (0,5 m nach vorne und hinten)
(e) Fahrzeugträgheit Izz (Faktor 4 / Faktor 0,25) - Erstellen Sie eine Ergebnistabelle mit den Kennwerte (KPIs) entsprechend der ISO
- Welche Beobachtungen machen Sie?
- Sammeln Sie die wichtigen Ergebnisse in einer PPT.
-
Geöffnet: Donnerstag, 18. November 2021, 00:00Fällig: Mittwoch, 22. Dezember 2021, 00:00
Im Vorfeld zur ESP Vorlesung von Herr Lutz am 18.12.2020 bitte folgende Aufgabe bearbeiten:
- Simulation "stationnäre Kreisfahrt nach ISO 4138"
- Versuchsvariante
(a) Basis
(b) Stabilisator vorne aushängen --> Amplification= 0 / Stabilisator hinten = standard
(c) Stabilisator hinten aushängen --> Amplification= 0 / Stabilisator vorne = standard - Identifikation der Lenkwinkelbedarfskurve (SWA vs. ay)
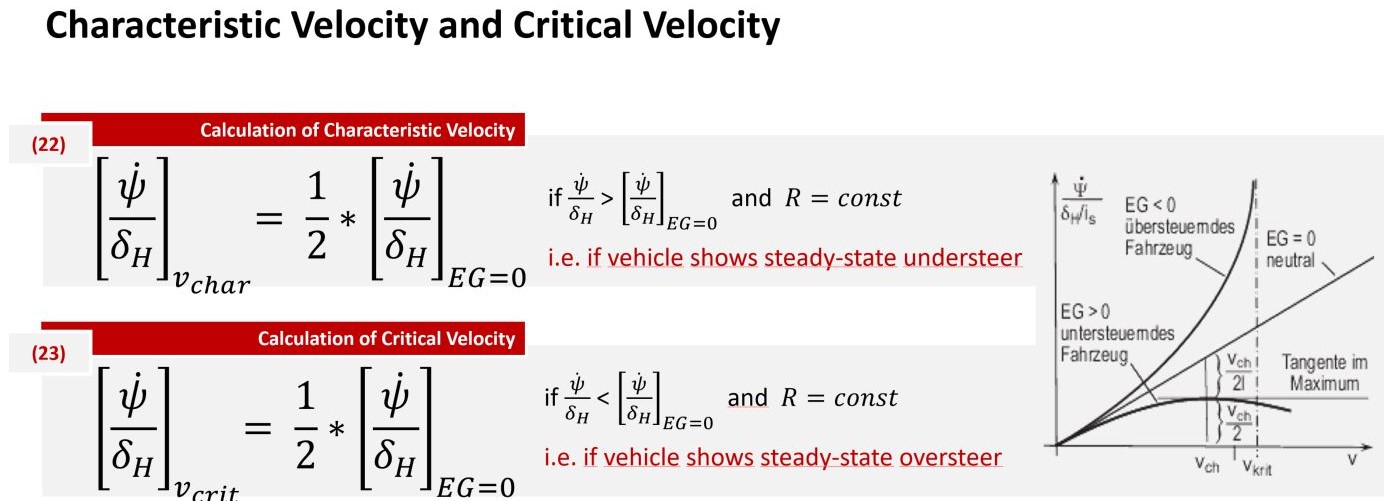
- Identifikation der kritischen Geschwindigkeit (siehe Vorlesungsskript oder Bild unten
Achtung: Gierverstärkung vs Car.v
Berechnung Gierverstärkung im MiniManöver=Qu::YawGain=Car.YawRate/Steer.WhlAng (in Global Settings/Preparation oder 1. Mini-Manöver) - Ergebnisse in einer Ergebnistabelle in PPT zusammentragen
- Interpretieren: Was sagen uns die Ergebnisse?
(a) Welches Eigenlenkverhalten und Steuerverhalten ergibt sich?
(b) Wie verändert sich die Gierverstärkung?
(c) Wie verändert sich die kritische Geschwindigkeit?
(d) Welche Auswirkungen kann dies auf die Stabilitätsregelung mittels ESP haben?
-
-
ABSTRACT:
Advanced Driver Assistance Systems and Automated Driving are a megatrend in the automotive industry. The following questions arise: Will vehicle manufacturers still be able to differentiate themselves "brand-specifically" in the future or will all vehicles be perceived the same when being driven? How can a brand DNA be implemented and how can the transfer of "fun to drive" to "fun to be driven" be achieved? In order to reach this, clear driving characteristic goals – in front of the customer – should be defined and the requirements for vehicle systems and components shall be derived from this. However, what are driving characteristics in the context of assisted and automated driving, Figure 1, and how can those specifically be achieved in the development? Porsche has addressed this question together with the University of Applied Sciences Kempten and MdynamiX. How can an attribute-based development look like and how can Porsche effectively design a brand-typical characteristic in this area?
-
Chassis controls and functions (2) - ESP–Functions & Application & Process
Albert Lutz (BOSCH)
-
Bremsbasierte Assistenzsysteme Grundlagen & ABSR
Dozent: Albert Lutz/Bosch -
Bremsbasierte Assistenzsysteme Fahrdynamikregelsysteme (ESP)
Dozent: Albert Lutz/Bosch
-
Chassis controls and functions (3) - ESP–Functions & Application & Process
-
Bremsbasierte Assistenzsysteme Fahrdynamikregelsysteme (ESP)
Dozent: Albert Lutz/Bosch -
Bremsbasierte Assistenzsysteme ESP-Applikation
Dozent: Albert Lutz/Bosch
-
HIer finden Sie das CarMaker Projekt für die ESP Übung für CarMaker Version 8.x.
- BItte in Ihr C:\CM_Projects kopieren und entpacken.
Bevor Sie das Projekt öffenen müssen Sie sich die CarMaker Version 8 herunterladen und installieren.Ich habe zusätzlich ein Projekt für CarMaker Version 9 (CM9) angelegt. Das aber nicht getestet ist.WICHTIG: Sie müssen unter Applikation - Configuration/Status die neue exe auswählen- Projekt ADAS_Master_ESP --> src/CarMaker.win64.exe
- Projekt ADAS_Master_ESP_CM9 --> src/CarMaker_ESP.win64.exe
VG Bernhard Schick
-
Chassis controls and functions (4) - ESP–Functions & Application & Process
-
ADAS Development for a sports car manufacturerSehr geehrte Damen und Herren,für die Vorlesung von Dr. Manuel Höfer von Porsche muss auf Grund technischer Probleme ein Microsoft Teams Link verwendet werden. Anbei der entsprechende Link.
-
Kontaktdaten:
Dr.-Ing. Manuel Höfer
Sachgebietsleiter Projektmanagement FAS/HAF &Cluster-Funktionsverantwortlicher FAS
manuel.hoefer@porsche.de
+49 170-9116835
-
-
-
Geöffnet: Sonntag, 1. Januar 2023, 00:00Fällig: Dienstag, 24. Januar 2023, 23:55Anbei erhalten Sie die PSA. Bearbeitungszeit bis zum 24.01.2023.
- Bitte berücksichtigen Sie die Informationen auf Folie 3 und 4.
- Verwenden Sie die PowerPoint Vorlage zur Bearbeitung der Aufgaben und Darstellung der Ergebnisse.
- Vermerken Sie bitte Ihren Namen und Matrikelnummer auf der Titelseite, Deckblatt und Masterfolie dieser Vorlage
- Bearbeiten Sie die Projektaufgaben und illustrieren Sie die Ergebnisse.
- Hilfsmittel: Alle, insbesondere zu verwenden ist die CarMaker Fahrdynamiksimulation und MXeval.
- Austausch und Gruppenarbeit ist grundsätzlich erlaubt. Es muss aber eine eigenständige Bearbeitung ersichtlich sein.
- Das verwendete Fahrzeug ist individuell und daher sind alle Ergebnisse unterschiedlich
- Abgabe als PSA_Vorname_Name_MatNr.ppt oder *.pptx und *.pdf
- Nur in Ausnahmefälle per Mail an Bernhard.Schick@hs-kempten.de.
- Für Fragen werden Sprechstunden angeboten und in Kürze mitgeteilt.
Viel ErfolgBernhard Schick - Bitte berücksichtigen Sie die Informationen auf Folie 3 und 4.
-